趋势杂谈 | vivo Vision的空间影像思考
📖 阅读提示
潜在读者
- 本文是科普,适合任何对影像感兴趣的盆友
推荐时长
- 1min–30min
vivo Vision 发布了。和 Apple Vision Pro 相比,最大的不同当然在于:重量更轻(398g VS. 632g)、价格更低(10000 VS. 30000)。

这些不是重点,本文想从影像角度来回答如下几个问题:
- 传感器咋样?
- Display咋样?
- 画质怎样?
- 以及,这背后能给我们哪些影像层面的启发?
传感器
声明:以下信息来自不同评测博主与资料整理,未亲自验证,仅供参考。
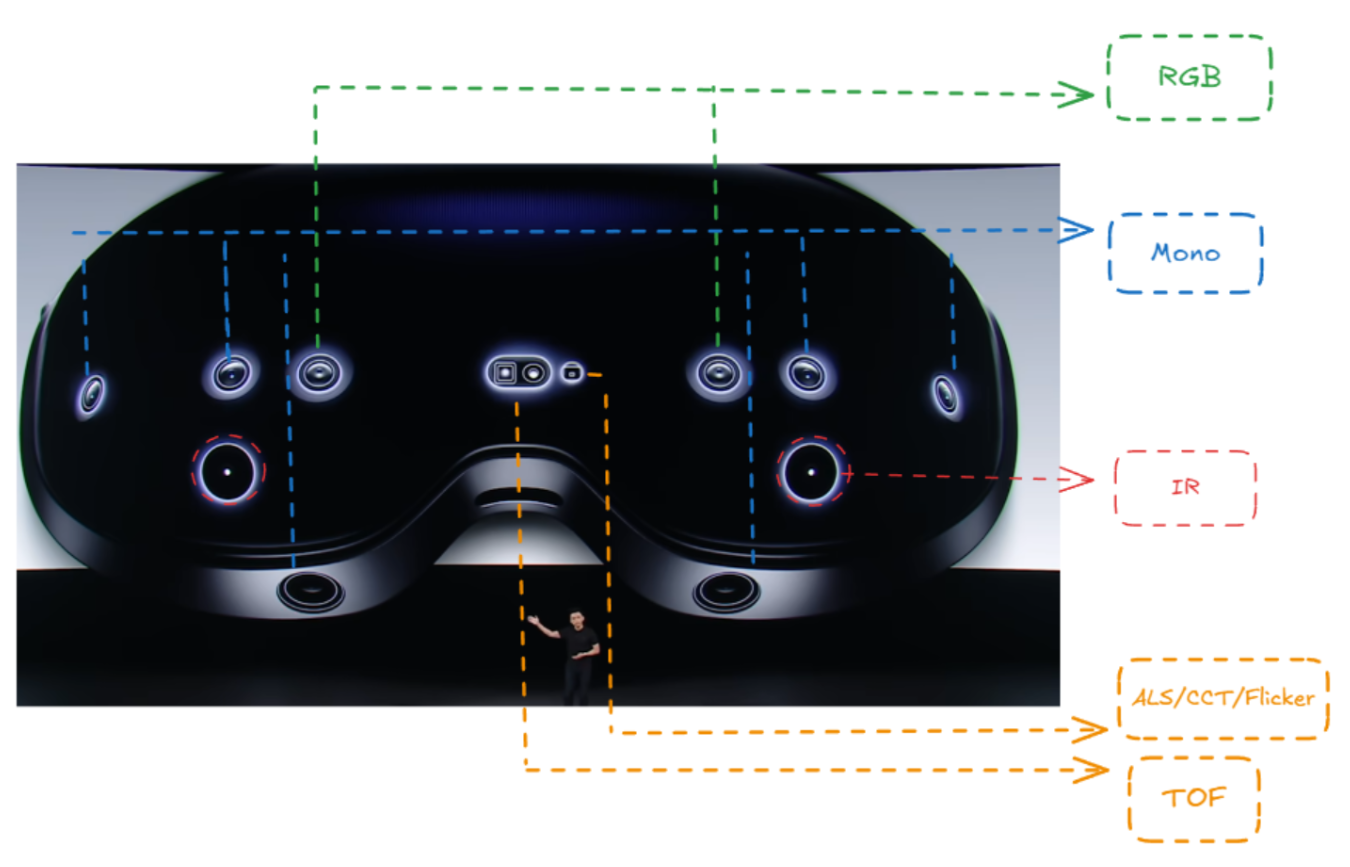
综合各家信息,我总结了上述的草图,也许不完全对,可以参考。
- RGB 主相机:核心成像,see-through 画面的关键。
- 灰度相机(Mono):两对不同 FOV + 冗余设计,用于深度估计与 SLAM,另一对专门做手势追踪。
- TOF 模组:细致测距,补充在特殊材质场景下的稳定性。
- 三合一传感器:环境光照度 (ALS)、色温 (CCT) 和频闪 (Flicker) 检测。
- IR 红外相机:贴近眼睛那一侧,用于眼动追踪。
Display

- 单眼 4K,双眼 8K:保证足够的清晰度,避免纱窗感。
- Micro-OLED + Pancake 架构:高对比 + 轻薄光学,降低头显重量。
- 90 Hz 刷新率,38 PPD:刷新率保证流畅不卡顿,PPD(像素密度)影响细节锐度。
- 亮度与色度校准—2 nits 误差,ΔE < 2:控制画面一致性,避免左右眼色差导致不适。
- 94% P3 广色域:能还原更多真实世界的颜色,apple 92% P3。
- 峰值 100 nits:几乎媲美电影院Dolby vision。
从纸面规格来看,已经直逼 Apple Vision Pro,尤其在色彩与校准上的认真程度,值得肯定。
画质
以下为“评价”而非严格评测,图来自 B 站各路博主。
Pros
整体完成度极高,大部分场景都没大问题。普遍评价是可达 Vision Pro 的 85%-90% 水准。能做到这一点,已经非常难得。
Cons
以下图都来自B站评测up主,画面有限
- 低光照噪声明显:例如墙面会发绿。

- 快速转头模糊。
- 文档可读性不足:字体看不清。
- 投屏色彩管理问题:

当然可能是拍摄偏色,但至少说明色彩链路仍需优化。
影像层面的启发
多模态带来的技术优势
- 比如,AWB,可以自然的结合深度信息来做
- AF,天然提供焦平面,减少反复hunt
- Desnoing,深度更加保边等等
注视区域优先:Foveated color rendering
- MR 有眼球追踪,完全可以基于human vision attention:
只保证视线注视区域(PPD)的色彩/亮度最优; 周边区域差不多就行,这是真正的ROI。
- 这会也许会成为未来 MR ISP/Display 的新范式:算力分配从“全局”转向“注视点优先”。
- MR 有眼球追踪,完全可以基于human vision attention:
画质评测指标的升级
- MR对用户的终极感知都是:是否晕,是否打破了沉浸感等
- 那么,MR 画质的评价,不应再是“分辨率、噪声、ΔE”这些客观指标,需要和沉浸感,眩晕感这些终极感知结合
- 甚至比如空间定位不准确也会导致眩晕——这意味着这个综合的感知不再局限于画质,而是一个更加广义的评测维度
- MR对用户的终极感知都是:是否晕,是否打破了沉浸感等
调色哲学的空间化
- 国产手机影像的逻辑是“真实+美化”,我觉得没毛病。人们喜欢的不是真实,人们的视觉充满了偏见,人们喜欢的是他们以为的真实。vivo影像口碑很好,被公认为第一梯队,就是因为他们定义了抽象的美。那么,如果未来把他们的调教哲学放进MR设备中,也许会让人们体验到震撼的美,相当于是给客观物理世界以美的‘滤镜’。当然,这意味着MR场景要走出室内,走向广阔的室外——那么挑战也就截然不同。
- 播放空间视频是我最喜欢的功能,他能让人感受3D沉浸记忆,但是这里的模式我一直困惑,就是不管是apple还是vivo似乎都是没有注意到空间视频和真实背景之间的gap,就比如下面俩视频展示,当时拍摄环境和现在的播放环境截然不同,为何不做一些类似于relighting的操作?(把视频光线改成现实,或者反之)这样才更加沉浸啊


当然,针对不同场景模式当然可以不一样: 沉浸模式:尽可能接近真实(回忆、照片/视频场景);
交互模式:有意强调边界与对比(办公、文档场景)。
这里的核心点在于你是否认同沉浸对于MR很重要,很重要。
小结:桥梁的意义
vivo 的野心当然不止于此。他们认为,MR 是未来收集机器人数据的最佳平台。
听起来有些震惊,但想一想就明白了:机器人要理解世界,无非就是深度、材质、光照、角度等物理信息,从而了解‘自我’和客观世界的关系——而这些,MR 设备天生都在采集。
真正的智能,离不开具身。机器人,是最后一块版图。
而具身智能最大的问题,就是数据不够。

vivo 研究院院长胡柏山说过一句话:
“MR 是连接物理世界和数字世界的桥梁。”
有人回怼说:“桥梁再好,对面数字世界没东西(生态)。”
这话没错,生态确实暂时不足。
但如果桥梁都不建,怎么会有生态?
技术的进步,往往就是这样——一步一步,最终跨越时代。